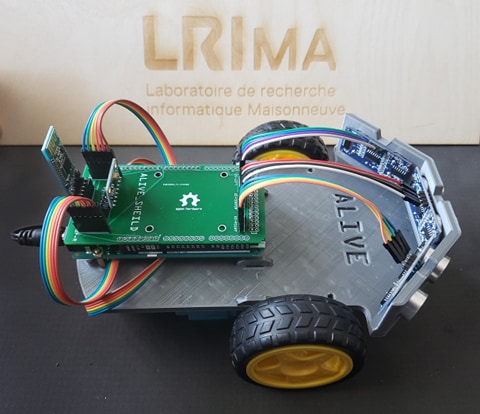
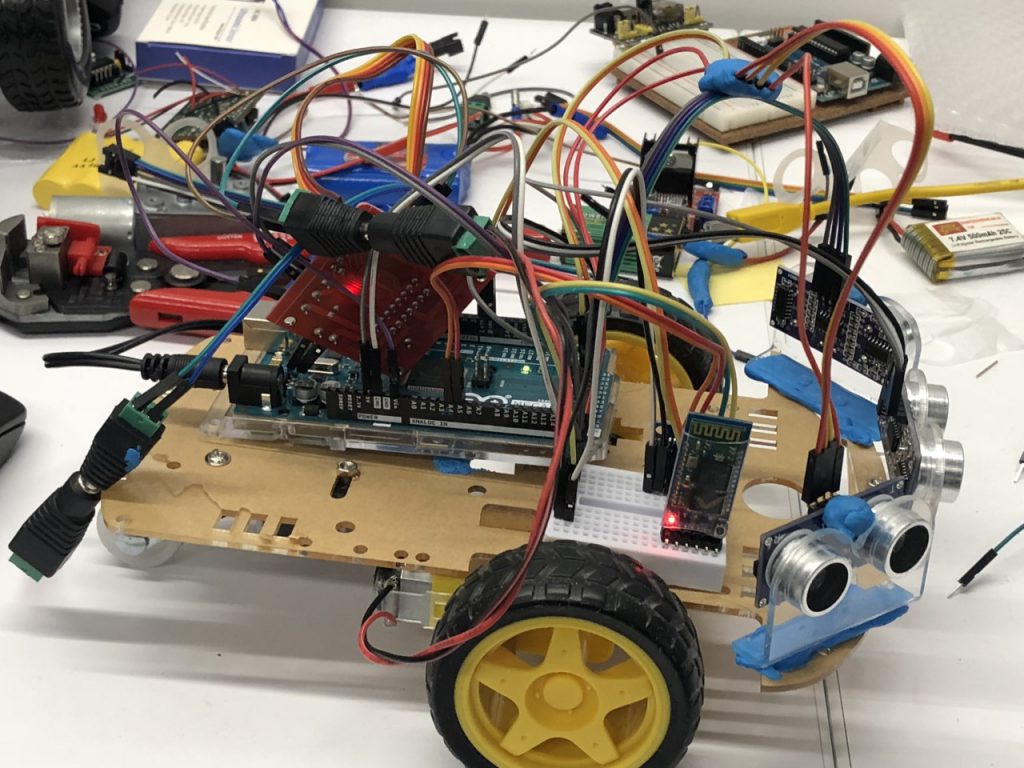
The project proposes an Autonomous Learning Intelligent Vehicles Engineering, called ALIVE 1.0 to let each vehicle have additional information about its surroundings in order to get an extended perception of its environment.
Moreover, ALIVE 1.0 car sensors will gather in real-time the required data concerning the vehicles environment which are fused into a learning algorithm predicting the vehicle’s response.
We tested our algorithm through different mazes to evaluate its efficiency to avoid obstacles without taking into account the way the obstacles are on his path.
This has been done in an effort to make ALIVE versatile, low-cost and work in any environment.
Preliminary results demonstrate the effectiveness of ALIVE-Bot 1.0 in terms of obstacle avoidance and minimizes delay.